About the project
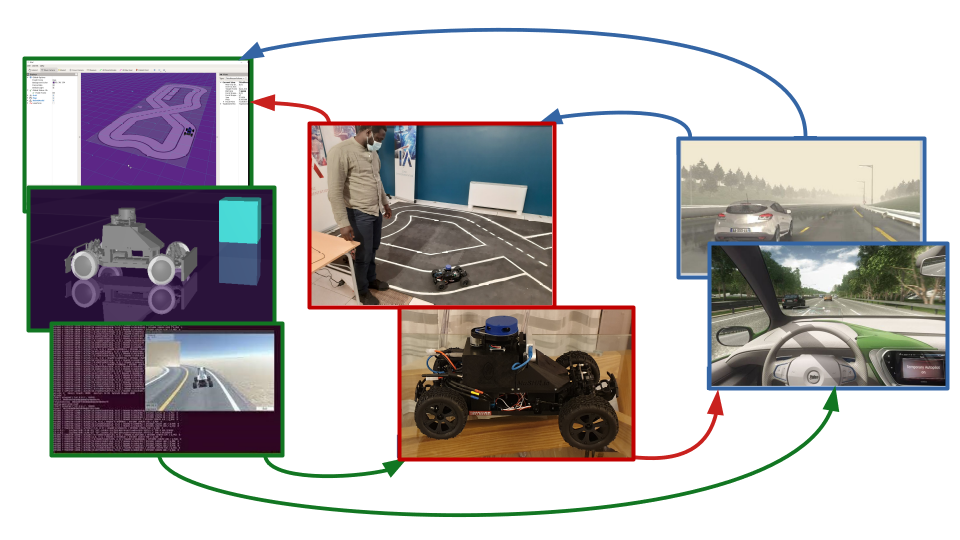
In MultiTrans project, we propose to tackle autonomous driving algorithms development and deployment jointly.
The idea is to enable data, experience and knowledge to be transferable across the different systems (simulation, robotic models, and real-word cars), thus potentially accelerating the rate an embedded intelligent system can gradually learn to operate at each deployment stage. Existing autonomous vehicles are able to learn how to react and operate in known domains autonomously but research is needed to help these systems during the perception stage, allowing them to be operational and safer in a wider range of situations. MultiTrans proposes to address this issue by developing an intermediate environment that allows to deploy algorithms in a physical world model, by re-creating more realistic use cases that would contribute to a better and faster transfer of perception algorithms to and from a real autonomous vehicle test-bed and between multiple domains.